Projective Peridynamics for Modeling Versatile Elastoplastic Materials
Abstract
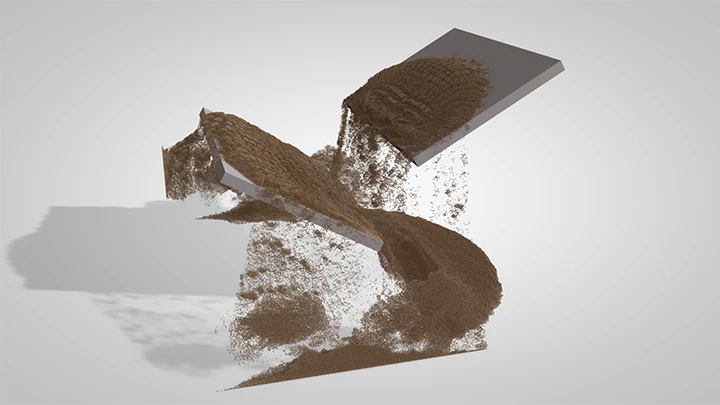
Unified simulation of versatile elastoplastic materials and different dimensions offers many advantages in animation production, contact handling, and hardware acceleration. The unstructured particle representation is particularly suitable for this task, thanks to its simplicity. However, previous meshless techniques either need too much computational cost for addressing stability issues, or lack physical meanings and fail to generate interesting deformation behaviors, such as the Poisson effect. In this paper, we study the development of an elastoplastic model under the state-based peridynamics framework, which uses integrals rather than partial derivatives in its formulation. To model elasticity, we propose a unique constitutive model and an efficient iterative simulator solved in a projective dynamics way. To handle plastic behaviors, we incorporate our simulator with the Drucker-Prager yield criterion and a reference position update scheme, both of which are implemented under peridynamics. Finally, we show how to strengthen the simulator by position-based constraints and spatially varying stiffness models, to achieve incompressibility, particle redistribution, cohesion, and friction effects in viscoelastic and granular flows. Our experiments demonstrate that our unified, meshless simulator is flexible, efficient, robust, and friendly with parallel computing.
Type
Publication
IEEE Transactions on Visualization and Computer Graphics, 24(9)
Computational Modeling
Deformable Models
Mathematical Model
Robustness
Plastics
Dynamics
Peridynamics
Projective Dynamics
Position-Based Dynamics
Elasticity
Plasticity
Viscoelasticity
Granular Flows
Authors
Chief Scientist
My research interests include computer graphics, computer vision, robotics, and generative AI.