Modeling Deformable Objects from a Single Depth Camera
Abstract
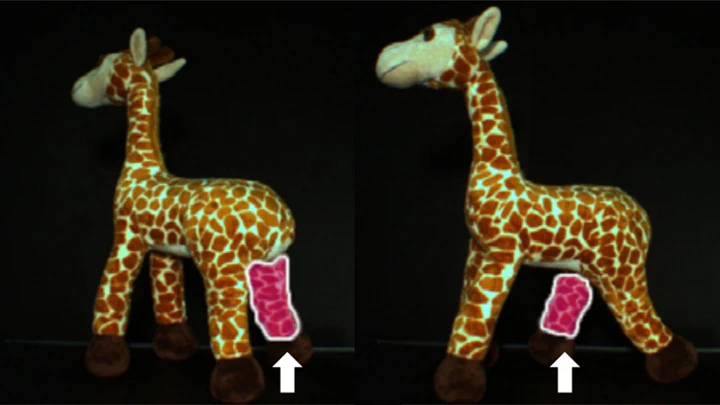
We propose a novel approach to reconstruct complete 3D deformable models over time by a single depth camera, provided that most parts of the models are observed by the camera at least once. The core of this algorithm is based on the assumption that the deformation is continuous and predictable in a short temporal interval. While the camera can only capture part of a whole surface at any time instant, partial surfaces reconstructed from different times are assembled together to form a complete 3D surface for each time instant, even when the shape is under severe deformation. A mesh warping algorithm based on linear mesh deformation is used to align different partial surfaces. A volumetric method is then used to combine partial surfaces, fix missing holes, and smooth alignment errors. Our experiment shows that this approach is able to reconstruct visually plausible 3D surface deformation results with a single camera.
Type
Publication
2009 IEEE 12th International Conference on Computer Vision (ICCV Oral)
Deformable Models
Cameras
Surface Reconstruction
Layout
Assembly
Shape
Stereo Vision
Fuses
Image Sequences
Focusing
Authors
Chief Scientist
My research interests include computer graphics, computer vision, robotics, and generative AI.